
|

|
|||||||||||||||


    |
|
|||||||||||||||
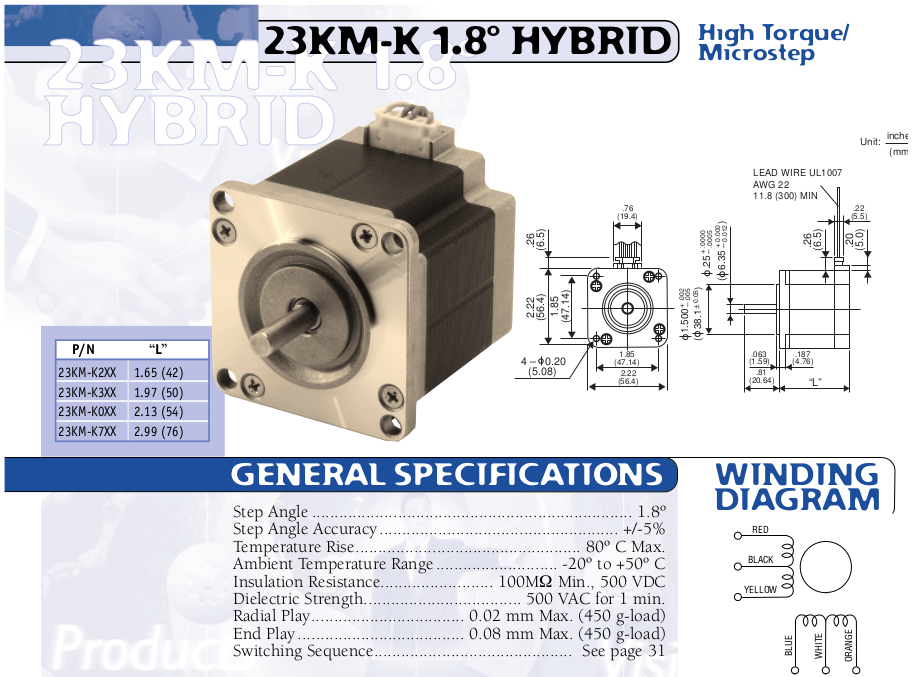
| COLOR DEL CABLE |
FUNCIÓN |
| NEGRO |
COMÚN (+5v) |
| BLANCO |
COMÚN (+5v) |
| ROJO |
DEVANADO A |
| AZUL |
DEVANADO B |
| AMARILLO |
DEVANADO C |
| NARANJA |
DEVANADO D |
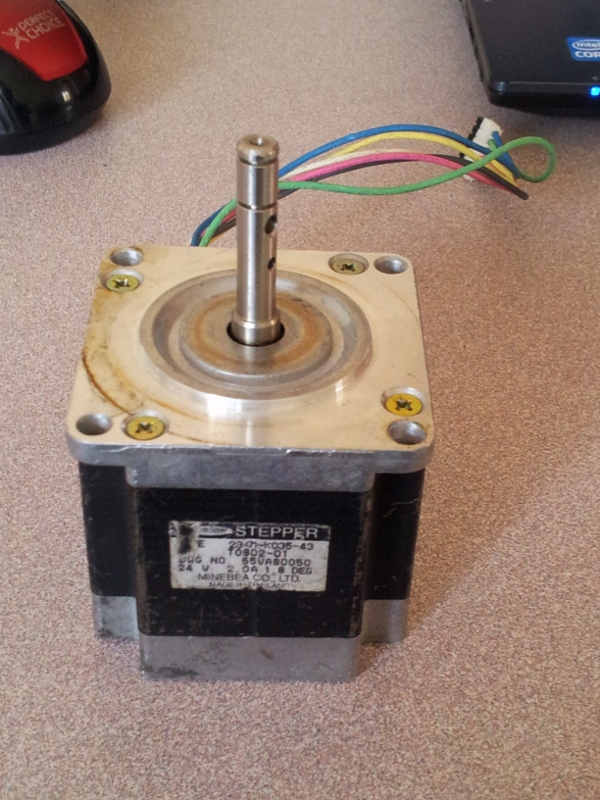
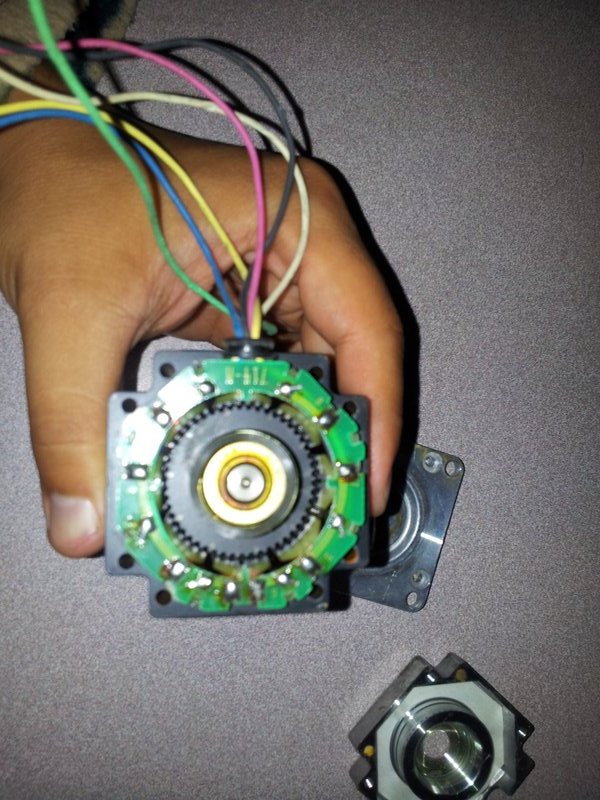
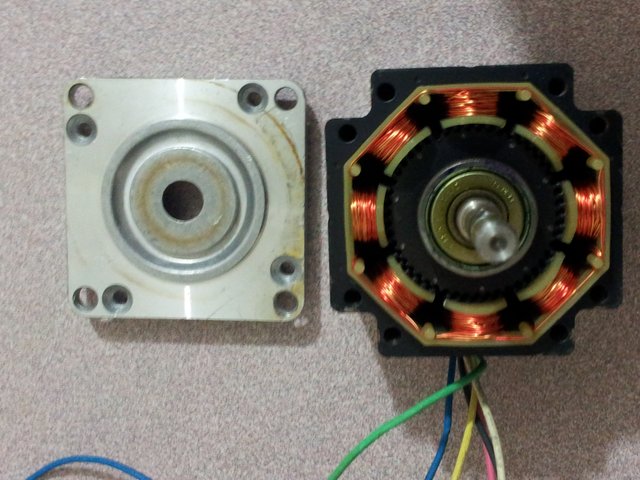
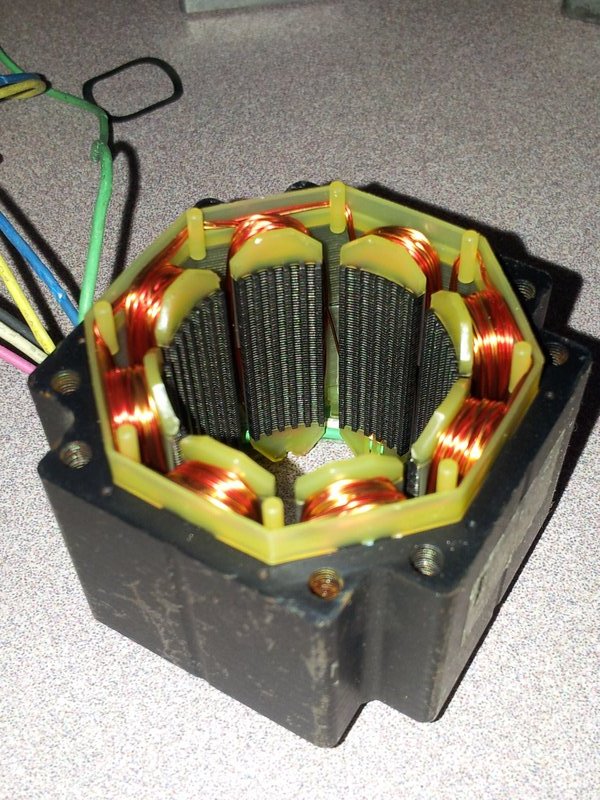
Las piezas que componen el motor se pueden apreciar en las siguientes fotos:



DRIVER DEL MOTOR A PASOS
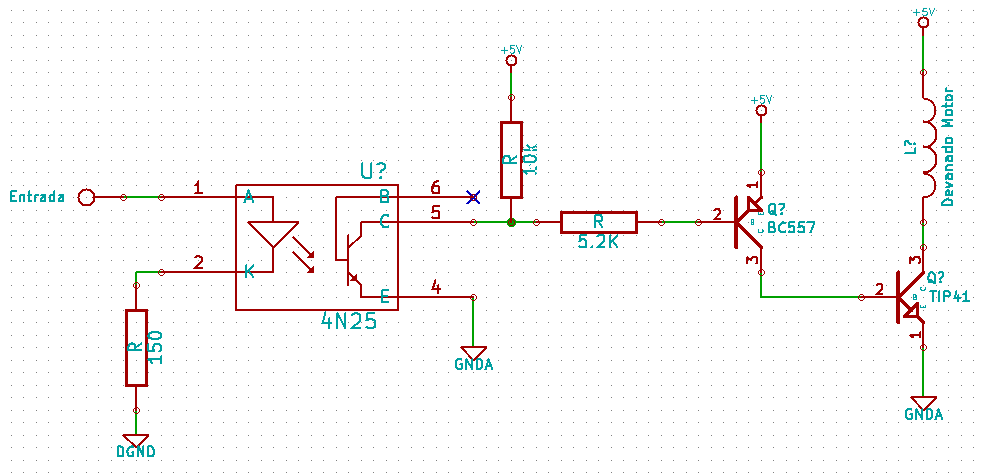
RELEVADOR DE ESTADO SÓLIDO
El circuito que hace la función de relevador de estado sólido es la base para poder controlar el motor, Esta parte es como un switch que energiza o desenergiza un solo devanado del motor a pasos.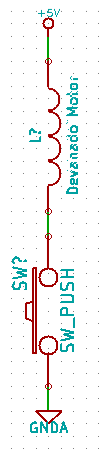
Para hacer que funcione adecuadamente el circuito, se debe de cumplir con los siguientes requerimientos:
- Se debe de aislar eléctricamente el circuito de Poder con el circuito Lógico
- Los transistores deben de funcionar en Corte y Saturación para evitar calentamiento
- La β del TIP41 debe ser mayor a 40
- La β del BC557 debe ser mayor a 100
- La β del 4N25 (la corriente del Transistor dividida entre la corriente del LED) debe ser mayor a 1.5
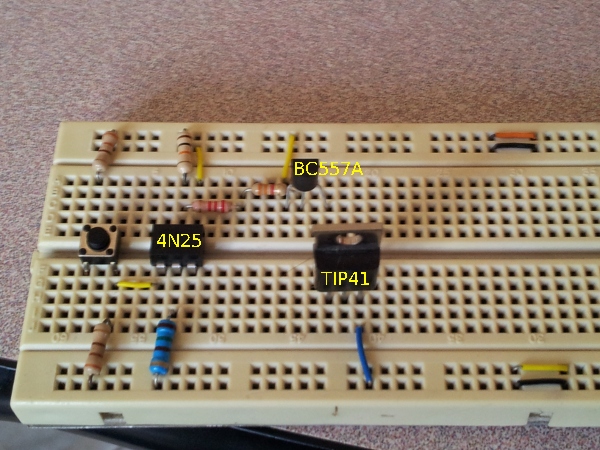
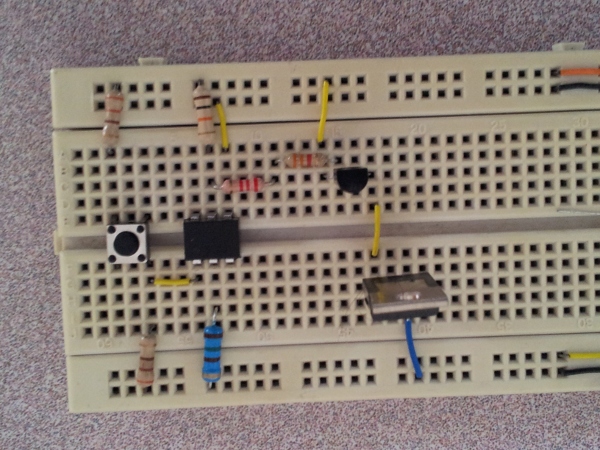
Una vez que funcionó en el
protoboard, hay que ponerlo en una placa perforada, soldando los
componentes. El relevador de estado sólido que diseñamos queda en un
espacio muy pequeño de la siguiente manera:
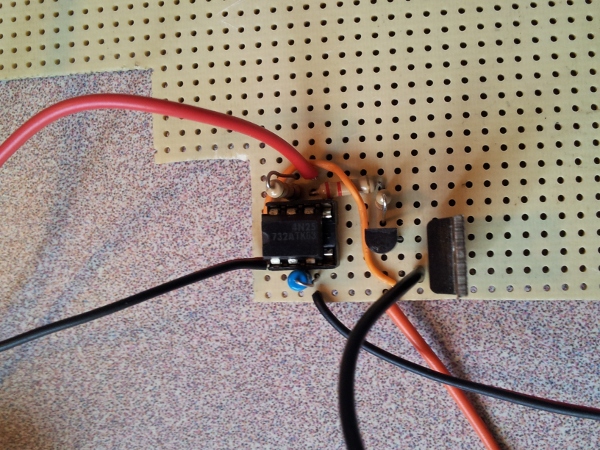

Ahora probamos que el circuito soldado en la placa funcione adecuadamente:
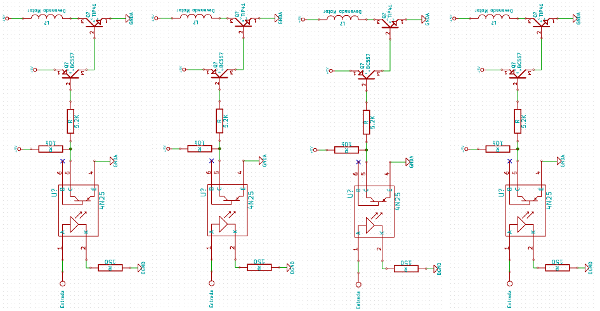
Ya
que nos funcionó adecuadamente el relevador de estado sólido, ahora hay
que multiplicarlo por cuatro. Por que nuestro motor tiene cuatro
devanados que hay que polarizar.
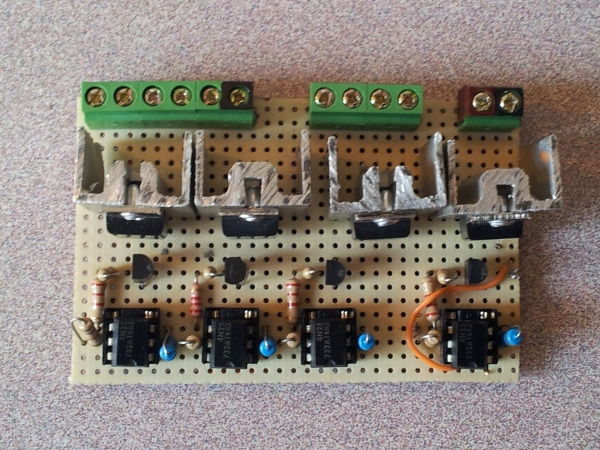
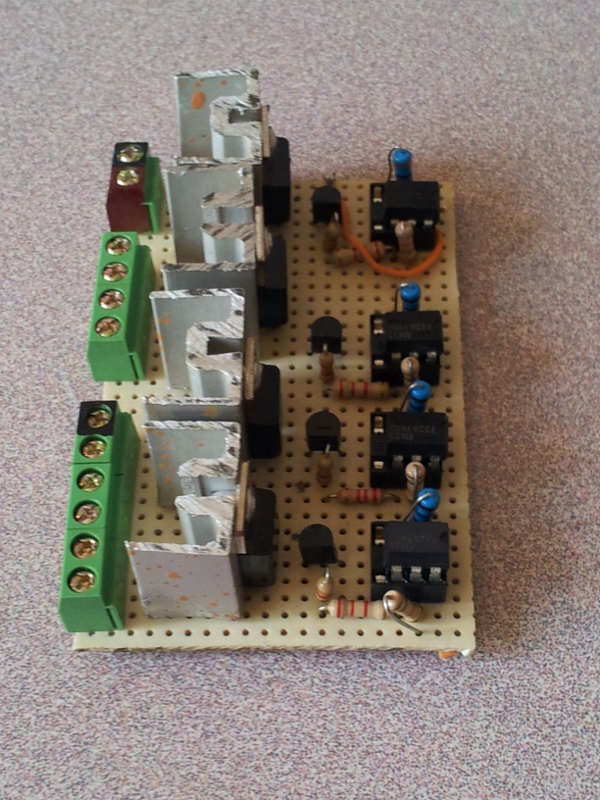
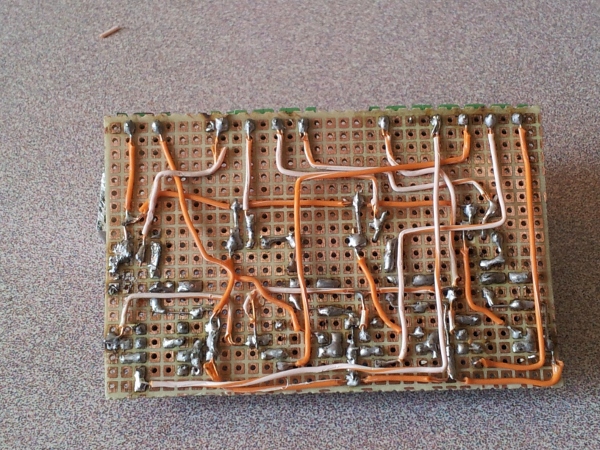
Una vez soldando todos los componentes en una tarjeta perforada, el driver quedaría de la siguiente manera:
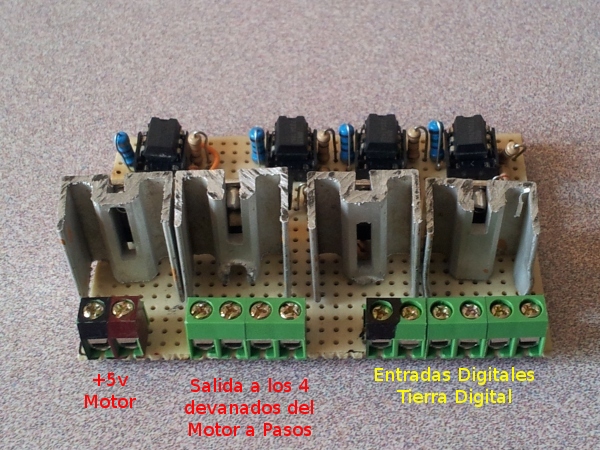
En la foto siguiente se
muestran los bornes para conectar la alimentación (Tierra digital y 5v
para el motor), las entradas digitales, y la salida a los devanados. Y
nos sobra un borne sin conectar.
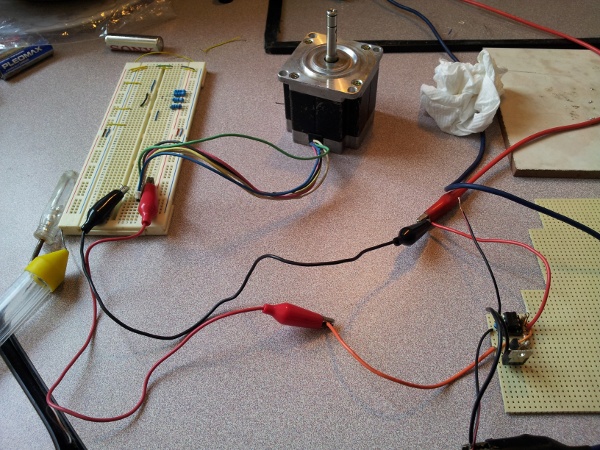
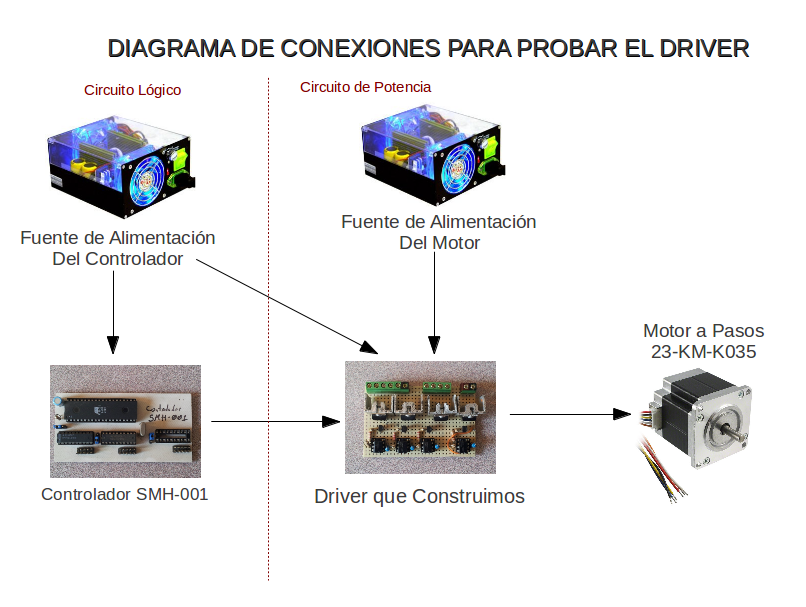
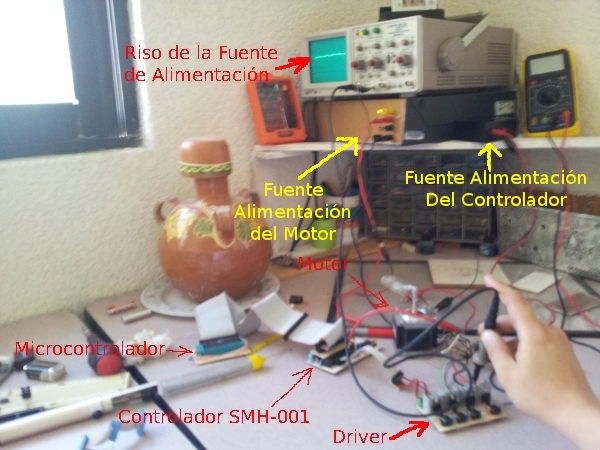
A continuación vemos la primera prueba del Driver completo. Para realizar la prueba utilizamos:
- Fuente de Alimentación de 5 volts de Corriente Contúnua para alimentar el Motor a Pasos
- Fuente de Alimentación de 5 Volts de Corriente Contínua para alimentar el Controlador
- Driver del Motor que acabamos de contruir
- Motor a Pasos
- Tarjeta Controlador SMH-001
- Microcontrolador AT89C51
BIBLIOGRAFÍA Y REFERENCIAS
- Minebea Co. Ltd; ESPECIFICACIONES DEL MOTOR 23KM-K
- NMB A Minebea Group Company; PRECISION STEP MOTORS CATALOG; www.nmbcorp.com;


